近日,永利官网自动化学院王翔博士作为第一作者,304am永利集团作为第一署名单位,在控制领域的顶级期刊《IEEE/ASME Transactions on Mechatronics》上发表了题为“Discrete-time position tracking control for multimotor driving systems via multipower terminal sliding-mode technique”的学术论文。青岛大学王保防副教授、于金鹏教授为通信作者,芝浦工业大学Xinkai Chen教授为合作者。该期刊是IEEE出版社旗下的控制领域顶级期刊,是中科院工程技术一区TOP期刊,专注于报道机电一体化理论和技术领域的最新进展。
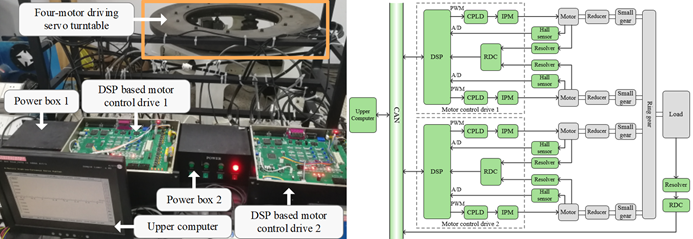
随着计算机数字控制系统的普及,离散时间控制设计越来越受到关注。本文提出了一种新型离散时间多幂次终端滑模控制方法,用于实现多电机驱动伺服系统的高精度位置跟踪。在建模方面,不同于常规动力学模型,本文基于系统输入输出数据,构建了一个具有较低阶次和较少参数的离散时间时变特征模型。在控制方面,本文构建了多幂次滑模函数以适应不同误差收敛阶段,改进了趋近律以避免积分饱和,利用高阶滑模技术降低抖振。通过离散Lyapunov理论,分别证明了滑模函数和跟踪误差的有限时间稳定性。最后,在四电机驱动伺服转台上进行了实验验证,结果表明所提方法在响应速度和跟踪精度方面具有优势。
论文链接:https://doi.org/10.1109/TMECH.2023.3295510
 您所处的位置
您所处的位置
 苏公网安备 32011502010453号
苏公网安备 32011502010453号



